Lecture 3
Optimization
Optimization is choosing the best option from a set of possible options. We have already encountered problems where we tried to find the best possible option, such as in the minimax algorithm, and today we will learn about tools that we can use to solve an even broader range of problems.
Local Search
Local search is a search algorithm that maintains a single node and searches by moving to a neighboring node. This type of algorithm is different from previous types of search that we saw. Whereas in maze solving, for example, we wanted to find the quickest way to the goal, local search is interested in finding the best answer to a question. Often, local search will bring to an answer that is not optimal but “good enough,” conserving computational power. Consider the following example of a local search problem: we have four houses in set locations. We want to build two hospitals, such that we minimize the distance from each house to a hospital. This problem can be visualized as follows:
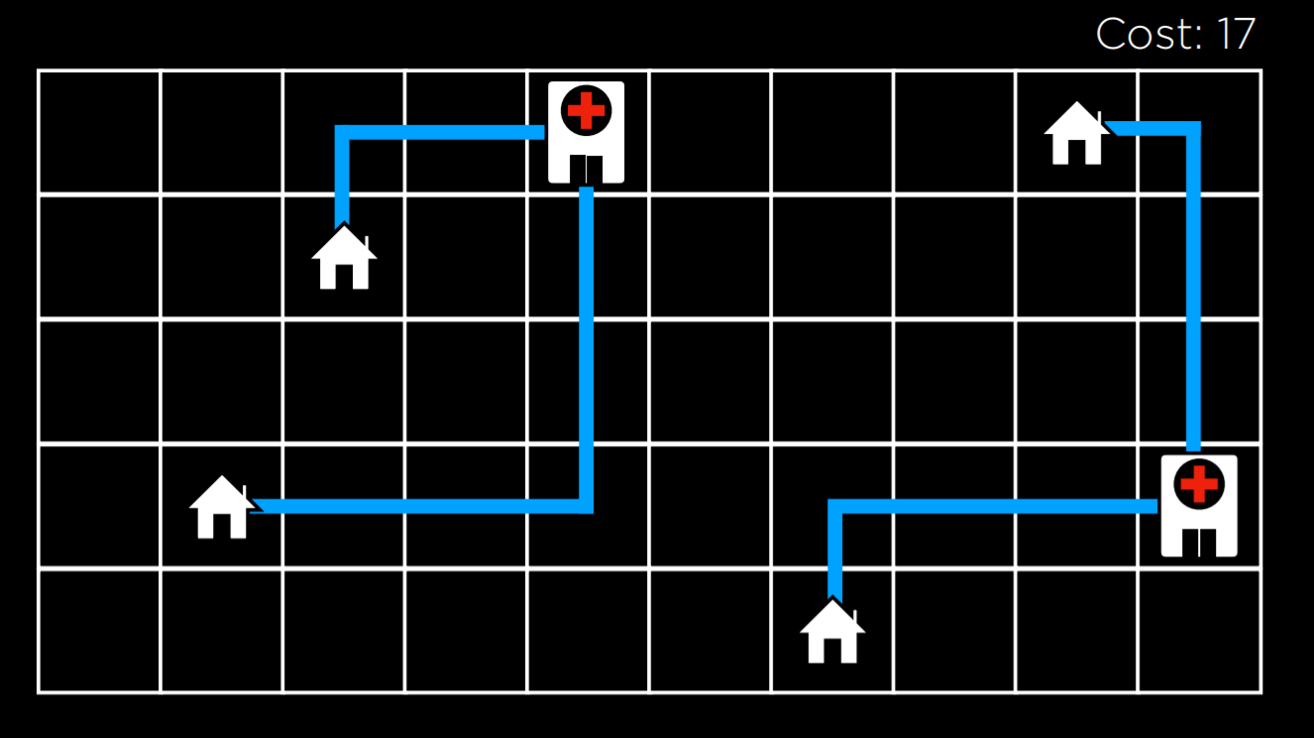
In this illustration, we are seeing a possible configuration of houses and hospitals. The distance between them is measured using Manhattan distance (number of moves up, down, and to the sides; discussed in more detail in lecture 0), and the sum of the distances from each house to the nearest hospital is 17. We call this the cost, because we try to minimize this distance. In this case, a state would be any one configuration of houses and hospitals.
Abstracting this concept, we can represent each configuration of houses and hospitals as the state-space landscape below. Each of the bars in the picture represents a value of a state, which in our example would be the cost of a certain configuration of houses and hospitals.

Going off of this visualization, we can define a few important terms for the rest of our discussion:
- An Objective Function is a function that we use to maximize the value of the solution.
- A Cost Function is a function that we use to minimize the cost of the solution (this is the function that we would use in our example with houses and hospitals. We want to minimize the distance from houses to hospitals).
- A Current State is the state that is currently being considered by the function.
- A Neighbor State is a state that the current state can transition to. In the one-dimensional state-space landscape above, a neighbor state is the state to either side of the current state. In our example, a neighbor state could be the state resulting from moving one of the hospitals to any direction by one step. Neighbor states are usually similar to the current state, and, therefore, their values are close to the value of the current state.
Note that the way local search algorithms work is by considering one node in a current state, and then moving the node to one of the current state’s neighbors. This is unlike the minimax algorithm, for example, where every single state in the state space was considered recursively.
Hill Climbing
Hill climbing is one type of a local search algorithm. In this algorithm, the neighbor states are compared to the current state, and if any of them is better, we change the current node from the current state to that neighbor state. What qualifies as better is defined by whether we use an objective function, preferring a higher value, or a decreasing function, preferring a lower value.
A hill climbing algorithm will look the following way in pseudocode:
function Hill-Climb(problem):
- current = initial state of problem
- repeat:
- neighbor = best valued neighbor of current
- if neighbor not better than current:
- return current
- current = neighbor
In this algorithm, we start with a current state. In some problems, we will know what the current state is, while, in others, we will have to start with selecting one randomly. Then, we repeat the following actions: we evaluate the neighbors, selecting the one with the best value. Then, we compare this neighbor’s value to the current state’s value. If the neighbor is better, we switch the current state to the neighbor state, and then repeat the process. The process ends when we compare the best neighbor to the current state, and the current state is better. Then, we return the current state.
Using the hill climbing algorithm, we can start to improve the locations that we assigned to the hospitals in our example. After a few transitions, we get to the following state:
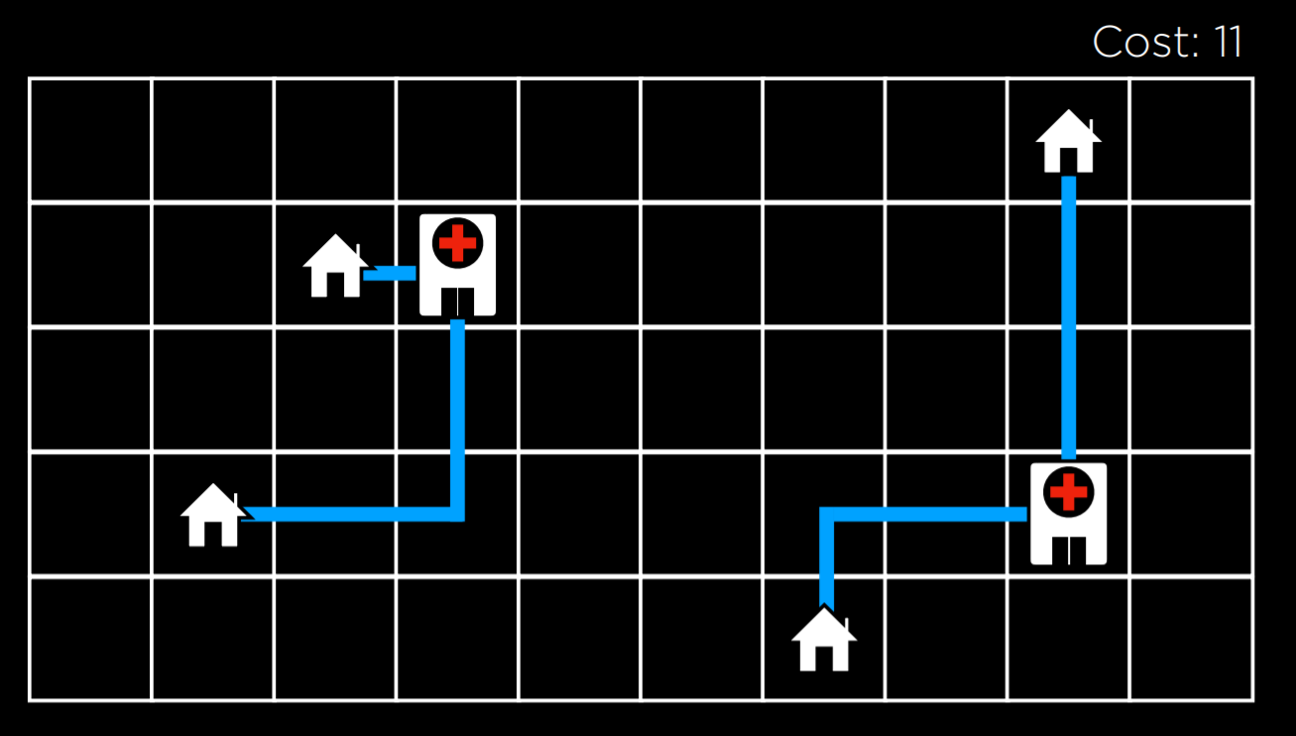
At this state, the cost is 11, which is an improvement over 17, the cost of the initial state. However, this is not the optimal state just yet. For example, moving the hospital on the left to be underneath the top left house would bring to a cost of 9, which is better than 11. However, this version of a hill climbing algorithm can’t get there, because all the neighbor states are at least as costly as the current state. In this sense, a hill climbing algorithm is short-sighted, often settling for solutions that are better than some others, but not necessarily the best of all possible solutions.
Local and Global Minima and Maxima
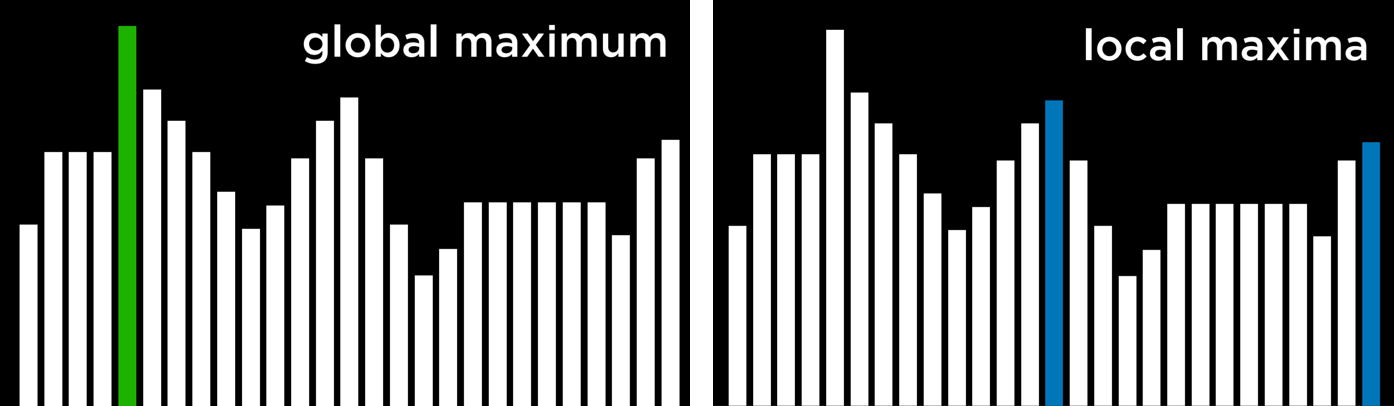
As mentioned above, a hill climbing algorithm can get stuck in local maxima or minima. A local maximum (plural: maxima) is a state that has a higher value than its neighboring states. As opposed to that, a global maximum is a state that has the highest value of all states in the state-space.
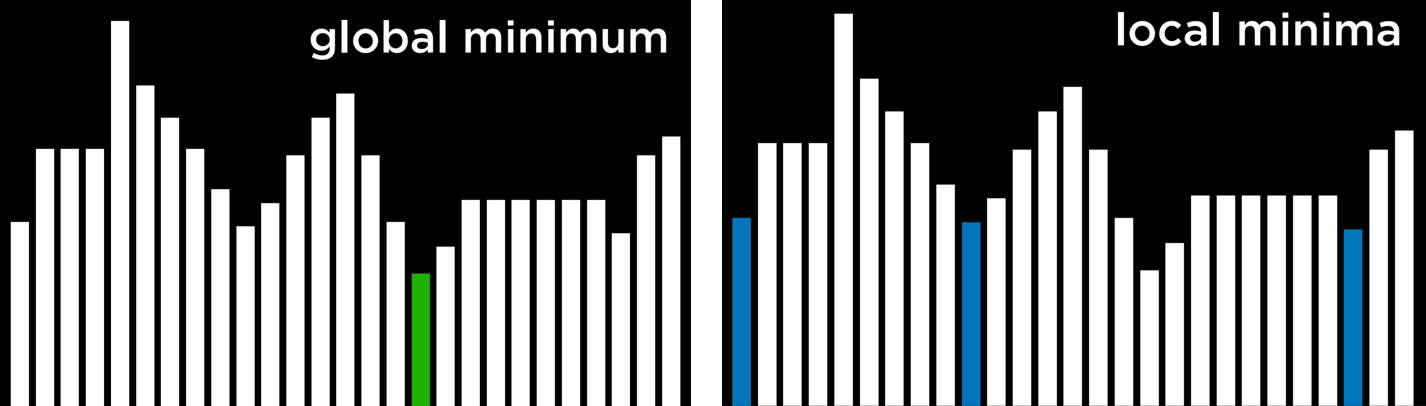
In contrast, a local minimum (plural: minima) is a state that has a lower value than its neighboring states. As opposed to that, a global minimum is a state that has the lowest value of all states in the state-space.
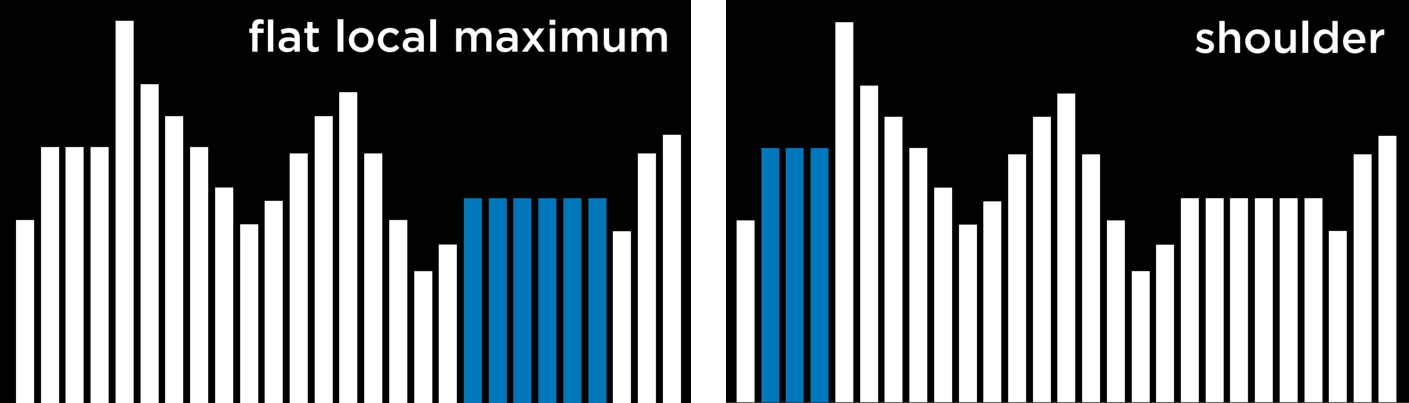
The problem with hill climbing algorithms is that they may end up in local minima and maxima. Once the algorithm reaches a point whose neighbors are worse, for the function’s purpose, than the current state, the algorithm stops. Special types of local maxima and minima include the flat local maximum/minimum, where multiple states of equal value are adjacent, forming a plateau whose neighbors have a worse value, and the shoulder, where multiple states of equal value are adjacent and the neighbors of the plateau can be both better and worse. Starting from the middle of the plateau, the algorithm will not be able to advance in any direction.
Hill Climbing Variants
Due to the limitations of Hill Climbing, multiple variants have been thought of to overcome the problem of being stuck in local minima and maxima. What all variations of the algorithm have in common is that, no matter the strategy, each one still has the potential of ending up in local minima and maxima and no means to continue optimizing. The algorithms below are phrased such that a higher value is better, but they also apply to cost functions, where the goal is to minimize cost.
- Steepest-ascent: choose the highest-valued neighbor. This is the standard variation that we discussed above.
- Stochastic: choose randomly from higher-valued neighbors. Doing this, we choose to go to any direction that improves over our value. This makes sense if, for example, the highest-valued neighbor leads to a local maximum while another neighbor leads to a global maximum.
- First-choice: choose the first higher-valued neighbor.
- Random-restart: conduct hill climbing multiple times. Each time, start from a random state. Compare the maxima from every trial, and choose the highest amongst those.
- Local Beam Search: chooses the k highest-valued neighbors. This is unlike most local search algorithms in that it uses multiple nodes for the search, and not just one.
Although local search algorithms don’t always give the best possible solution, they can often give a good enough solution in situations where considering every possible state is computationally infeasible.
Simulated Annealing
Although we have seen variants that can improve hill climbing, they all share the same fault: once the algorithm reaches a local maximum, it stops running. Simulated annealing allows the algorithm to “dislodge” itself if it gets stuck in a local maximum.
Annealing is the process of heating metal and allowing it to cool slowly, which serves to toughen the metal. This is used as a metaphor for the simulated annealing algorithm, which starts with a high temperature, being more likely to make random decisions, and, as the temperature decreases, it becomes less likely to make random decisions, becoming more “firm.” This mechanism allows the algorithm to change its state to a neighbor that’s worse than the current state, which is how it can escape from local maxima. The following is pseudocode for simulated annealing:
function Simulated-Annealing(problem, max):
- current = initial state of problem
- for t = 1 to max:
- T = Temperature(t)
- neighbor = random neighbor of current
- ΔE = how much better neighbor is than current
- if ΔE > 0:
- current = neighbor
- with probability e^(ΔE/T) set current = neighbor
- return current
The algorithm takes as input a problem and max, the number of times it should repeat itself. For each iteration, T is set using a Temperature function. This function return a higher value in the early iterations (when t is low) and a lower value in later iterations (when t is high). Then, a random neighbor is selected, and ΔE is computed such that it quantifies how better the neighbor state is than the current state. If the neighbor state is better than the current state (ΔE > 0), as before, we set our current state to be the neighbor state. However, when the neighbor state is worse (ΔE < 0), we still might set our current state to be that neighbor state, and we do so with probability e^(ΔE/T). The idea here is that a more negative ΔE will result in lower probability of the neighbor state being chosen, and the higher the temperature T the higher the probability that the neighbor state will be chosen. This means that the worse the neighbor state, the less likely it is to be chosen, and the earlier the algorithm is in its process, the more likely it is to set a worse neighbor state as current state. The math behind this is as follows: e is a constant (around 2.72), and ΔE is negative (since this neighbor is worse than the current state). The more negative ΔE, the closer the resulting value to 0. The higher the temperature T is, the closer ΔE/T is to 0, making the probability closer to 1.
Traveling Salesman Problem
In the traveling salesman problem, the task is to connect all points while choosing the shortest possible distance. This is, for example, what delivery companies need to do: find the shortest route from the store to all the customers’ houses and back.
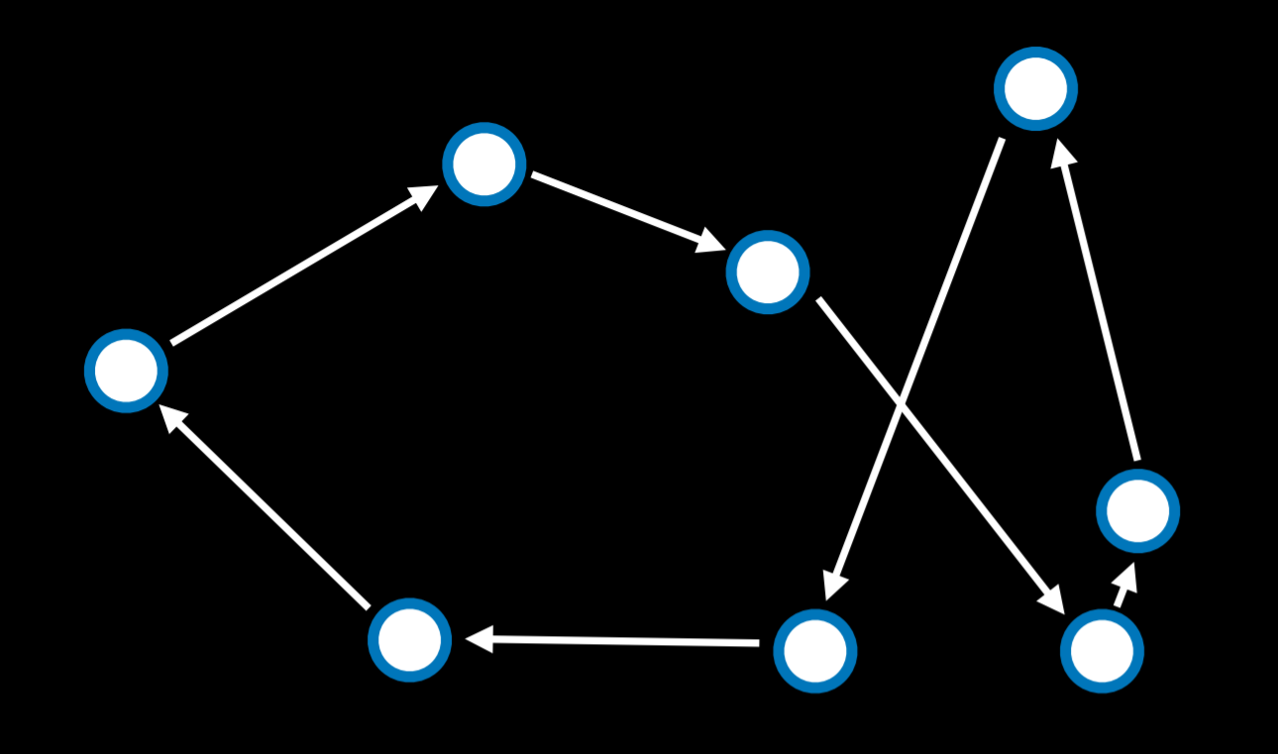
In this case, a neighbor state might be seen as a state where two arrows swap places. Calculating every possible combination makes this problem computationally demanding (having just 10 points gives us 10!, or 3,628,800 possible routes). By using the simulated annealing algorithm, a good solution can be found for a lower computational cost.
Linear Programming
Linear programming is a family of problems that optimize a linear equation (an equation of the form y = ax₁ + bx₂ + …).
Linear programming will have the following components:
- A cost function that we want to minimize: c₁x₁ + c₂x₂ + … + cₙxₙ. Here, each x₋ is a variable and it is associated with some cost c₋.
- A constraint that’s represented as a sum of variables that is either less than or equal to a value (a₁x₁ + a₂x₂ + … + aₙxₙ ≤ b) or precisely equal to this value (a₁x₁ + a₂x₂ + … + aₙxₙ = b). In this case, x₋ is a variable, and a₋ is some resource associated with it, and b is how much resources we can dedicate to this problem.
- Individual bounds on variables (for example, that a variable can’t be negative) of the form lᵢ ≤ xᵢ ≤ uᵢ.
Consider the following example:
- Two machines, X₁ and X₂. X₁ costs $50/hour to run, X₂ costs $80/hour to run. The goal is to minimize cost. This can be formalized as a cost function: 50x₁ + 80x₂.
- X₁ requires 5 units of labor per hour. X₂ requires 2 units of labor per hour. Total of 20 units of labor to spend. This can be formalized as a constraint: 5x₁ + 2x₂ ≤ 20.
- X₁ produces 10 units of output per hour. X₂ produces 12 units of output per hour. Company needs 90 units of output. This is another constraint. Literally, it can be rewritten as 10x₁ + 12x₂ ≥ 90. However, constraints need to be of the form (a₁x₁ + a₂x₂ + … + aₙxₙ ≤ b) or (a₁x₁ + a₂x₂ + … + aₙxₙ = b). Therefore, we multiply by (-1) to get to an equivalent equation of the desired form: (-10x₁) + (-12x₂) ≤ -90.
An optimizing algorithm for linear programming requires background knowledge in geometry and linear algebra that we don’t want to assume. Instead, we can use algorithms that already exist, such as Simplex and Interior-Point.
The following is a linear programming example that uses the scipy library in Python:
import scipy.optimize
# Objective Function: 50x_1 + 80x_2
# Constraint 1: 5x_1 + 2x_2 <= 20
# Constraint 2: -10x_1 + -12x_2 <= -90
result = scipy.optimize.linprog(
[50, 80], # Cost function: 50x_1 + 80x_2
A_ub=[[5, 2], [-10, -12]], # Coefficients for inequalities
b_ub=[20, -90], # Constraints for inequalities: 20 and -90
)
if result.success:
print(f"X1: {round(result.x[0], 2)} hours")
print(f"X2: {round(result.x[1], 2)} hours")
else:
print("No solution")
Constraint Satisfaction
Constraint Satisfaction problems are a class of problems where variables need to be assigned values while satisfying some conditions.
Constraints satisfaction problems have the following properties:
- Set of variables (x₁, x₂, …, xₙ)
- Set of domains for each variable {D₁, D₂, …, Dₙ}
- Set of constraints C
Sudoku can be represented as a constraint satisfaction problem, where each empty square is a variable, the domain is the numbers 1-9, and the constraints are the squares that can’t be equal to each other.
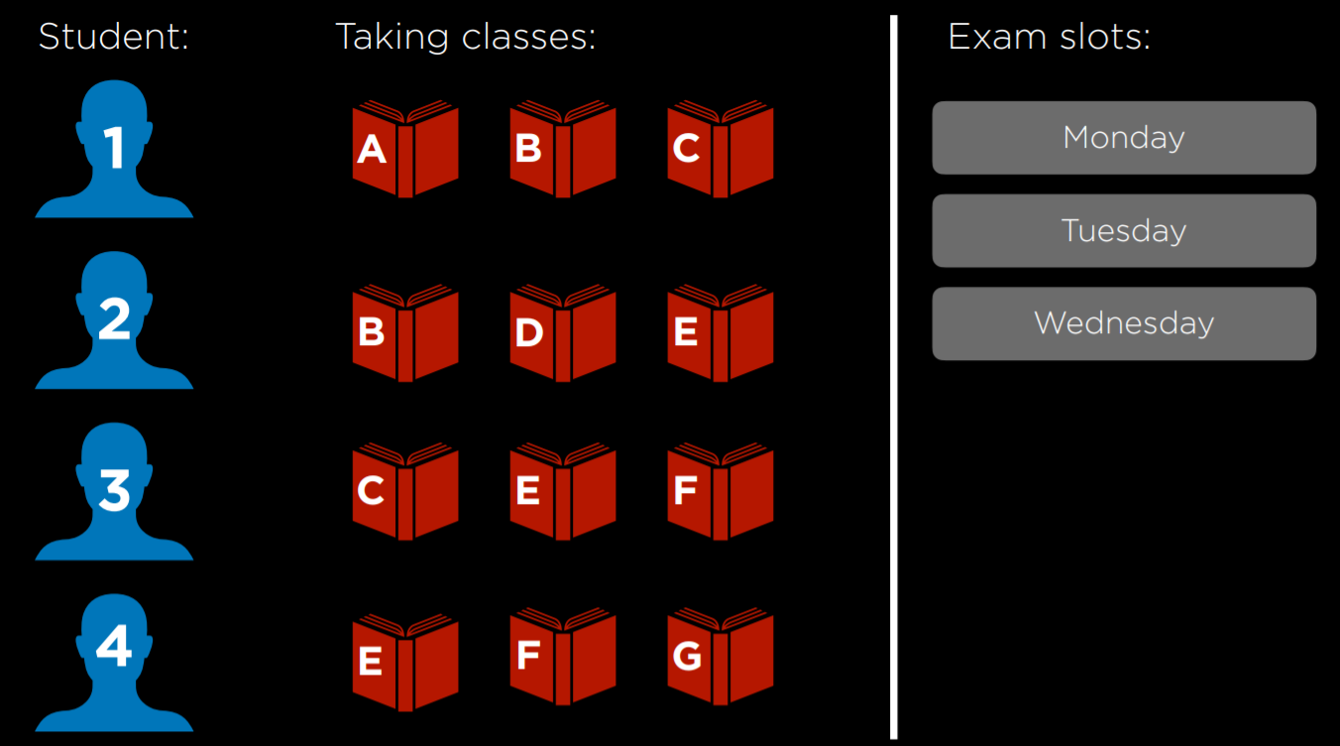
Consider another example. Each of students 1-4 is taking three courses from A, B, …, G. Each course needs to have an exam, and the possible days for exams are Monday, Tuesday, and Wednesday. However, the same student can’t have two exams on the same day. In this case, the variables are the courses, the domain is the days, and the constraints are which courses can’t be scheduled to have an exam on the same day because the same student is taking them. This can be visualized as follows:
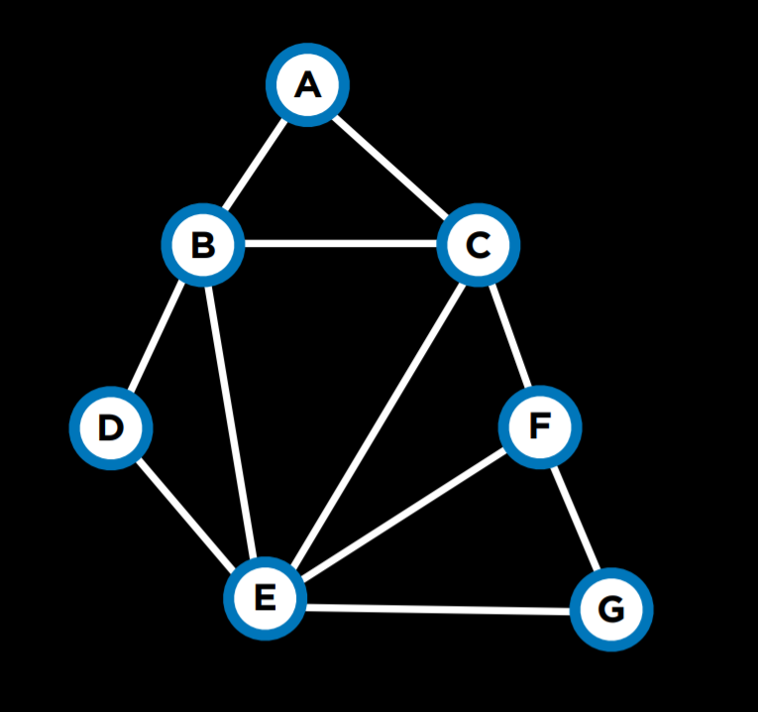
This problem can be solved using constraints that are represented as a graph. Each node on the graph is a course, and an edge is drawn between two courses if they can’t be scheduled on the same day. In this case, the graph will look this:
A few more terms worth knowing about constraint satisfaction problems:
- A Hard Constraint is a constraint that must be satisfied in a correct solution.
- A Soft Constraint is a constraint that expresses which solution is preferred over others.
- A Unary Constraint is a constraint that involves only one variable. In our example, a unary constraint would be saying that course A can’t have an exam on Monday {A ≠ Monday}.
- A Binary Constraint is a constraint that involves two variables. This is the type of constraint that we used in the example above, saying that some two courses can’t have the same value {A ≠ B}.
Node Consistency
Node consistency is when all the values in a variable’s domain satisfy the variable’s unary constraints.
For example, let’s take two courses, A and B. The domain for each course is {Monday, Tuesday, Wednesday}, and the constraints are {A ≠ Mon, B ≠ Tue, B ≠ Mon, A ≠ B}. Now, neither A nor B is consistent, because the existing constraints prevent them from being able to take every value that’s in their domain. However, if we remove Monday from A’s domain, then it will have node consistency. To achieve node consistency in B, we will have to remove both Monday and Tuesday from its domain.
Arc Consistency
Arc consistency is when all the values in a variable’s domain satisfy the variable’s binary constraints (note that we are now using “arc” to refer to what we previously referred to as “edge”). In other words, to make X arc-consistent with respect to Y, remove elements from X’s domain until every choice for X has a possible choice for Y.
Consider our previous example with the revised domains: A:{Tuesday, Wednesday} and B:{Wednesday}. For A to be arc-consistent with B, no matter what day A’s exam gets scheduled (from its domain), B will still be able to schedule an exam. Is A arc-consistent with B? If A takes the value Tuesday, then B can take the value Wednesday. However, if A takes the value Wednesday, then there is no value that B can take (remember that one of the constraints is A ≠ B). Therefore, A is not arc-consistent with B. To change this, we can remove Wednesday from A’s domain. Then, any value that A takes (Tuesday being the only option) leaves a value for B to take (Wednesday). Now, A is arc-consistent with B. Let’s look at an algorithm in pseudocode that makes a variable arc-consistent with respect to some other variable (note that csp stands for “constraint satisfaction problem”).
function Revise(csp, X, Y):
- revised = false
- for x in X.domain:
- if no y in Y.domain satisfies constraint for (X,Y):
- delete x from X.domain
- revised = true
- if no y in Y.domain satisfies constraint for (X,Y):
- return revised
This algorithm starts with tracking whether any change was made to X’s domain, using the variable revised. This will be useful in the next algorithm we examine. Then, the code repeats for every value in X’s domain and sees if Y has a value that satisfies the constraints. If yes, then do nothing, if not, remove this value from X’s domain.
Often we are interested in making the whole problem arc-consistent and not just one variable with respect to another. In this case, we will use an algorithm called AC-3, which uses Revise:
function AC-3(csp):
- queue = all arcs in csp
- while queue non-empty:
- (X, Y) = Dequeue(queue)
- if Revise(csp, X, Y):
- if size of X.domain == 0:
- return false
- for each Z in X.neighbors - {Y}:
- Enqueue(queue, (Z,X))
- if size of X.domain == 0:
- return true
This algorithm adds all the arcs in the problem to a queue. Each time it considers an arc, it removes it from the queue. Then, it runs the Revise algorithm to see if this arc is consistent. If changes were made to make it consistent, further actions are needed. If the resulting domain of X is empty, it means that this constraint satisfaction problem is unsolvable (since there are no values that X can take that will allow Y to take any value given the constraints). If the problem is not deemed unsolvable in the previous step, then, since X’s domain was changed, we need to see if all the arcs associated with X are still consistent. That is, we take all of X’s neighbors except Y, and we add the arcs between them and X to the queue. However, if the Revise algorithm returns false, meaning that the domain wasn’t changed, we simply continue considering the other arcs.
While the algorithm for arc consistency can simplify the problem, it will not necessarily solve it, since it considers binary constraints only and not how multiple nodes might be interconnected. Our previous example, where each of 4 students is taking 3 courses, remains unchanged by running AC-3 on it.
We have encountered search problems in our first lecture. A constraint satisfaction problem can be seen as a search problem:
- Initial state: empty assignment (all variables don’t have any values assigned to them).
- Actions: add a {variable = value} to assignment; that is, give some variable a value.
- Transition model: shows how adding the assignment changes the assignment. There is not much depth to this: the transition model returns the state that includes the assignment following the latest action.
- Goal test: check if all variables are assigned a value and all constraints are satisfied.
- Path cost function: all paths have the same cost. As we mentioned earlier, as opposed to typical search problems, optimization problems care about the solution and not the route to the solution.
However, going about a constraint satisfaction problem naively, as a regular search problem, is massively inefficient. Instead, we can make use of the structure of a constraint satisfaction problem to solve it more efficiently.
Backtracking Search
Backtracking search is a type of a search algorithm that takes into account the structure of a constraint satisfaction search problem. In general, it is a recursive function that attempts to continue assigning values as long as they satisfy the constraints. If constraints are violated, it tries a different assignment. Let’s look at the pseudocode for it:
function Backtrack(assignment, csp):
- if assignment complete:
- return assignment
- var = Select-Unassigned-Var(assignment, csp)
- for value in Domain-Values(var, assignment, csp):
- if value consistent with assignment:
- add {var = value} to assignment
- result = Backtrack(assignment, csp)
- if result ≠ failure:
- return result
- remove {var = value} from assignment
- if value consistent with assignment:
- return failure
In words, this algorithm starts with returning the current assignment if it is complete. This means that, if the algorithm is done, it will not perform any of the additional actions. Instead, it will just return the completed assignment. If the assignment is not complete, the algorithm selects any of the variables that do not have an assignment yet. Then, the algorithm tries to assign a value to the variable, and runs the Backtrack algorithm again on the resulting assignment (recursion). Then, it checks the resulting value. If it is not failure, it means that the assignment worked out, and it should return this assignment. If the resulting value is failure, then the latest assignment is removed, and a new possible value is attempted, repeating the same process. If all possible values in the domain returned failure, this means that we need to backtrack. That is, that the problem is with some previous assignment. If this happens with the variable we start with, then it means that no solution satisfies the constraints.
Consider the following course of action:
![]()
We start with empty assignments (top left). Then, we choose the variable A, and assign to it some value, Monday (top right). Then, using this assignment, we run the algorithm again. Now that A already has an assignment, the algorithm will consider B, and assign Monday to it (bottom left). This assignment returns false, so instead of assigning a value to C given the previous assignment, the algorithm will try to assign a new value to B, Tuesday (bottom right). This new assignment satisfies the constraints, and a new variable will be considered next given this assignment. If, for example, assigning also Tuesday or Wednesday to B would bring to a failure, then the algorithm would backtrack and return to considering A, assigning another value to it, Tuesday. If also Tuesday and Wednesday return failure, then it means we have tried every possible assignment and the problem is unsolvable.
In the source code section, you can find an implementation from scratch of the backtrack algorithm. However, this algorithm is widely used, and, as such, multiple libraries already contain an implementation of it.
Inference
Although backtracking search is more efficient than simple search, it still takes a lot of computational power. Enforcing arc consistency, on the other hand, is less resource intensive. By interleaving backtracking search with inference (enforcing arc consistency), we can get at a more efficient algorithm. This algorithm is called the Maintaining Arc-Consistency algorithm. This algorithm will enforce arc-consistency after every new assignment of the backtracking search. Specifically, after we make a new assignment to X, we will call the AC-3 algorithm and start it with a queue of all arcs (Y,X) where Y is a neighbor of X (and not a queue of all arcs in the problem). Following is a revised Backtrack algorithm that maintains arc-consistency, with the new additions in bold.
function Backtrack(assignment, csp):
- if assignment complete:
- return assignment
- var = Select-Unassigned-Var(assignment, csp)
- for value in Domain-Values(var, assignment, csp):
- if value consistent with assignment:
- add {var = value} to assignment
- inferences = Inference(assignment, csp)
- if inferences ≠ failure:
- add inferences to assignment
- result = Backtrack(assignment, csp)
- if result ≠ failure:
- return result
- remove {var = value} and inferences from assignment
- if value consistent with assignment:
- return failure
The Inference function runs the AC-3 algorithm as described. Its output is all the inferences that can be made through enforcing arc-consistency. Literally, these are the new assignments that can be deduced from the previous assignments and the structure of the constrain satisfaction problem.
There are additional ways to make the algorithm more efficient. So far, we selected an unassigned variable randomly. However, some choices are more likely to bring to a solution faster than others. This requires the use of heuristics. A heuristic is a rule of thumb, meaning that, more often than not, it will bring to a better result than following a naive approach, but it is not guaranteed to do so.
Minimum Remaining Values (MRV) is one such heuristic. The idea here is that if a variable’s domain was constricted by inference, and now it has only one value left (or even if it’s two values), then by making this assignment we will reduce the number of backtracks we might need to do later. That is, we will have to make this assignment sooner or later, since it’s inferred from enforcing arc-consistency. If this assignment brings to failure, it is better to find out about it as soon as possible and not backtrack later.
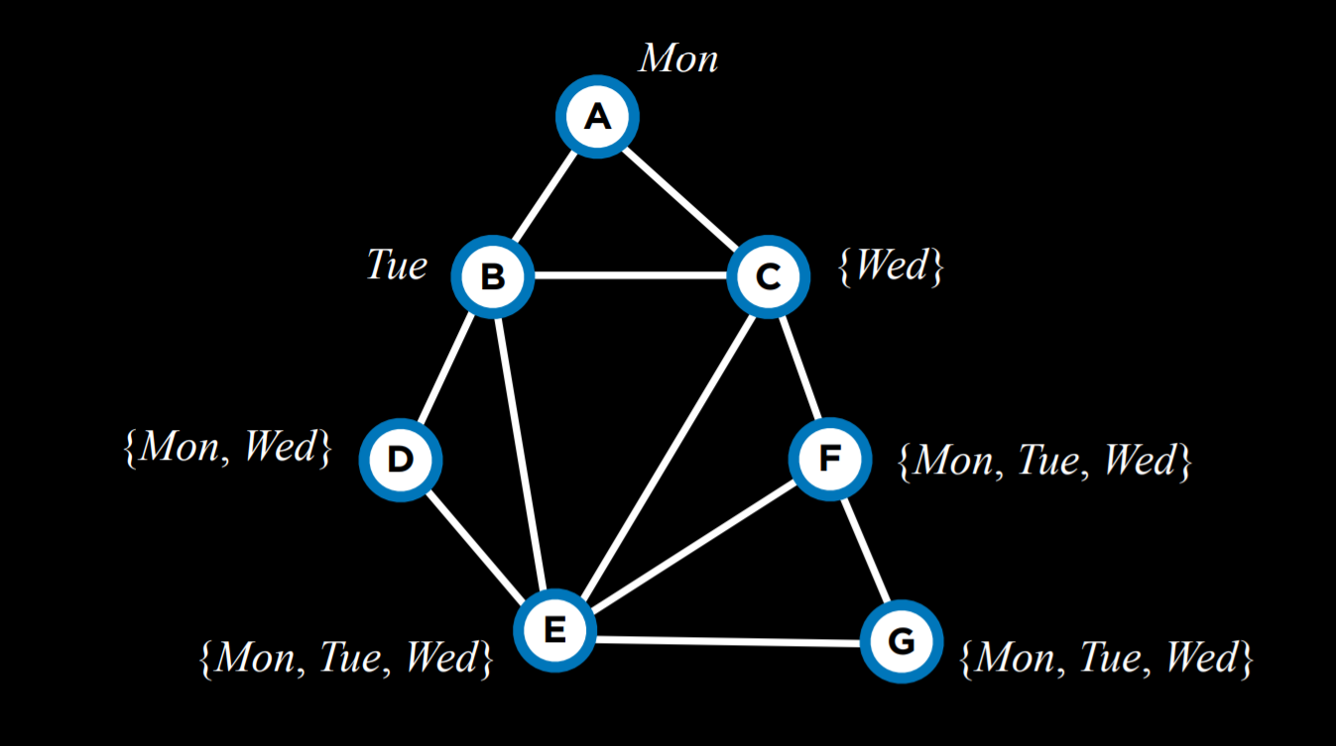
For example, after having narrowed down the domains of variables given the current assignment, using the MRV heuristic, we will choose variable C next and assign the value Wednesday to it.
The Degree heuristic relies on the degrees of variables, where a degree is how many arcs connect a variable to other variables. By choosing the variable with the highest degree, with one assignment, we constrain multiple other variables, speeding the algorithm’s process.
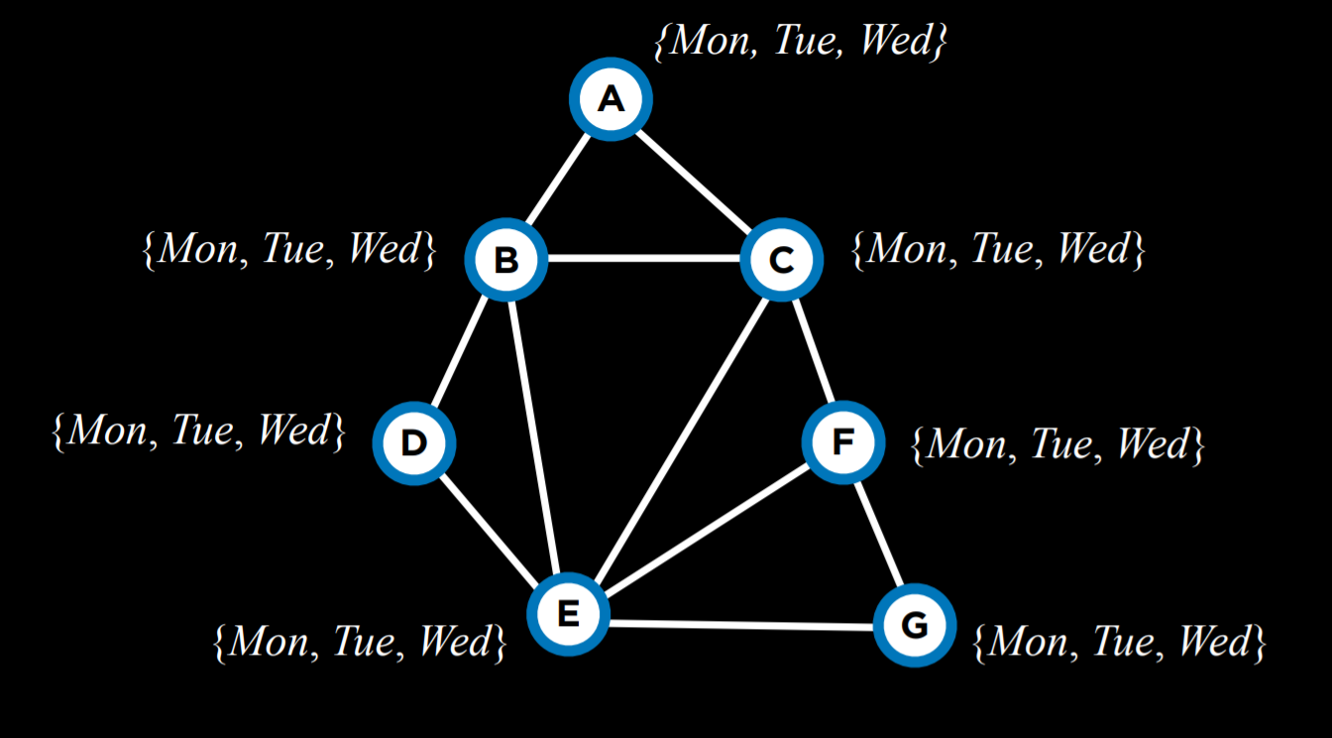
For example, all the variables above have domains of the same size. Thus, we should pick a domain with the highest degree, which would be variable E.
Both heuristics are not always applicable. For example, when multiple variables have the same least number of values in their domain, or when multiple variables have the same highest degree.
Another way to make the algorithm more efficient is employing yet another heuristic when we select a value from the domain of a variable. Here, we would like to use the Least Constraining Values heuristic, where we select the value that will constrain the least other variables. The idea here is that, while in the degree heuristic we wanted to use the variable that is more likely to constrain other variables, here we want this variable to place the least constraints on other variables. That is, we want to locate what could be the largest potential source of trouble (the variable with the highest degree), and then render it the least troublesome that we can (assign the least constraining value to it).
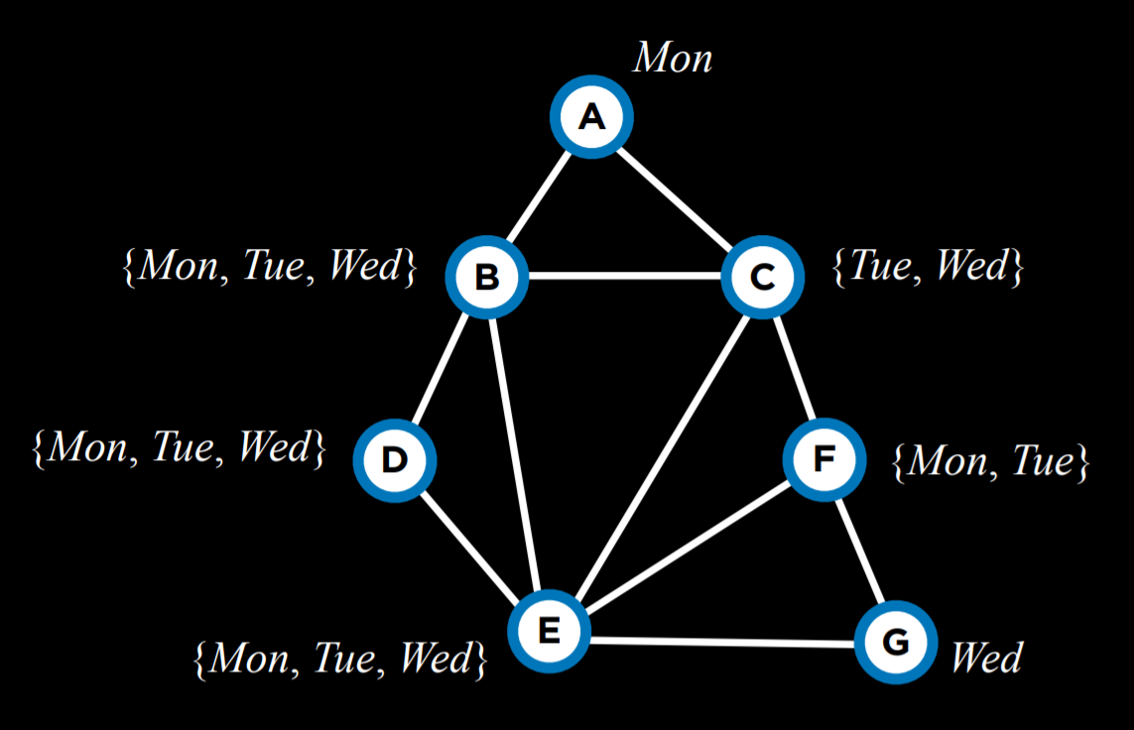
For example, let’s consider variable C. If we assign Tuesday to it, we will put a constraint on all of B, E, and F. However, if we choose Wednesday, we will put a constraint only on B and E. Therefore, it is probably better to go with Wednesday.
To summarize, optimization problems can be formulated in multiple ways. Today we considered local search, linear programming, and constraint satisfaction.